首页
品牌
排行
问答
专题
特惠
资讯
展会
百科
热门行业
装修建材
家居生活
餐饮食品
母婴教育
电脑办公
服装首饰
汽车工具
家电数码
机械化工
休闲美容
热门行业
教育培训
板材
地板
涂料
家纺
集成吊顶
美缝剂
木门
硅藻泥
管材
指纹锁
橱柜
衣柜
床垫
电热水器
集成灶
暖气片
净水器
酒店
卫浴
装修建材
卫浴洁具
板材
地板
建筑陶瓷
天花板
涂料
瓷砖泥瓦
水电管材
火锅
快餐
生活用品
软装
装饰装潢
灯具
家纺
干洗服务
内衣
男装
女装
幼教
整体卫浴
地板砖
阻燃板
铝材
集成吊顶
美缝剂
硅藻泥
管材
烤鱼
汉堡
叶酸
婴儿用品
婴儿床
指纹锁
品牌首页
品牌资讯
企业信息
商标信息
专利信息
返回上一页
专利状态
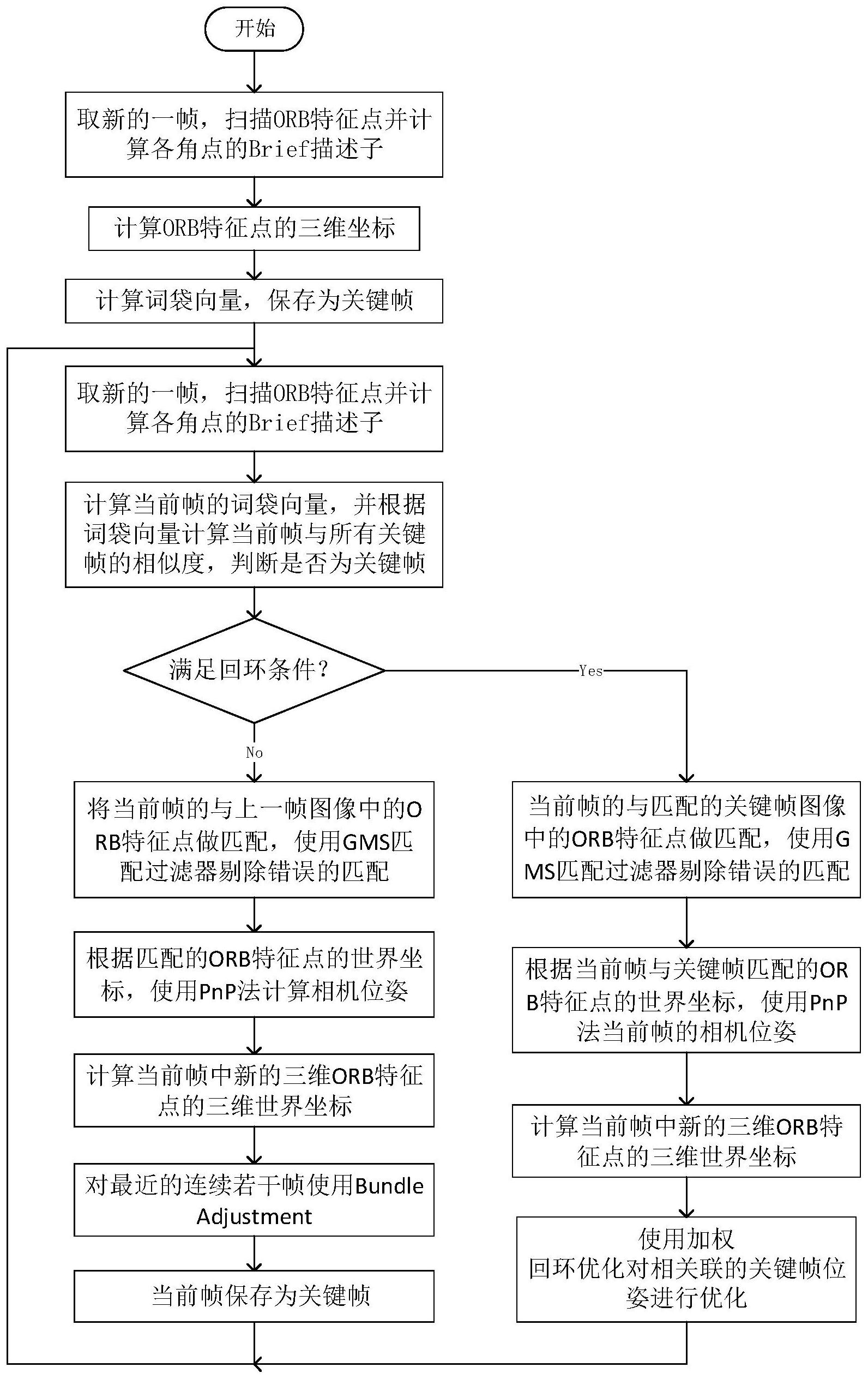
基于ORB特征点和GMS匹配过滤器的视觉里程计实现方法
有效
专利申请进度
申请
2019-12-31
申请公布
2020-11-03
授权
2022-08-12
预估到期
2039-12-31
专利基础信息
申请号
CN201911409777.2
申请日
2019-12-31
申请公布号
CN111882602A
申请公布日
2020-11-03
授权公布号
CN111882602B
授权公告日
2022-08-12
分类号
G06V10/75;G06T7/246;G06T7/269;G06K9/62
分类
计算;推算;计数;
申请人名称
宝时得科技(中国)有限公司
申请人地址
江苏省南京市孝陵卫200号
专利法律状态
2022-08-12
授权
状态信息
授权
2020-11-03
公布
状态信息
公布
摘要
本发明公开了一种基于ORB特征点和GMS匹配过滤器的视觉里程计实现方法,使用RGB‑D相机或双目相机采集视频流;对于每一帧图像,基于相机当前位姿,获取图像中的特征点(包括特征点对应角点的二维像素坐标、三维世界坐标和brief描述子);对当前帧和上一帧之间的特征点结合GMS匹配过滤器进行匹配;根据对上一帧匹配到的特征点,求解PnP问题,得到当前帧的相机位姿;对最近的连续若干帧使用Bundle Adjustment同时优化相机位姿和特征点三维世界坐标;使用词袋模型计算当前帧的词袋向量,判定是否需要将当前帧保存为关键帧,或者是否出现回环;若出现回环,则使用快速回环优化对相关的关键帧进行优化。本发明在保证对相机重投影误差足够小的情况下,较传统奇异值分解的方法运算更简便,保证实时性。
更多专利
1
动力工具
2
清洗机的进水组件和具有其的手持式清洗机
3
辅助手柄组件及打磨系统
4
割草机
5
手推轮式车辆
6
通水管密封结构及水钻
7
多功能机
8
自动行走设备及其状态控制方法
9
充电状态的显示方法、装置、电池包、电动工具及充电设备
10
防静电电动工具
11
割草机及能够应用于割草机的盖合装置
12
接口附件及压力清洗机
13
摆动动力工具
14
清洁机器人及其控制方法
15
智能割草机及其控制方法
16
智能割草机及其控制方法
17
动力工具
18
动力工具
19
一种电动工具及其电机正反转控制方法及装置
20
自动行走设备
全国服务热线:
在线客服
1211389656
咨询
商务合作
85926368
咨询
媒体合作
921888730
咨询
在线客服
客服微信号
品牌网官方客服微信
打开微信扫一扫
客服微信
商务合作微信
商务合作详谈
打开微信扫一扫
商务合作
回到顶部
 教育培训
教育培训